NoMaDbot™
04/16/2024
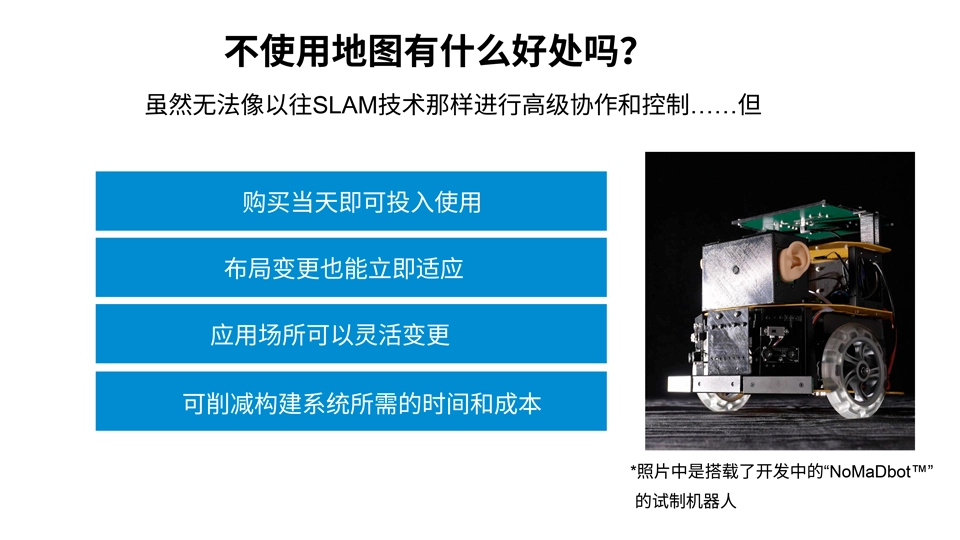
*照片为搭载了目前正在开发的“NoMaDbot™”的试制机器人
目录
- 1. AGV和AMR的普及所暴露出来的现场问题
- 2.生物无需地图即可到达目的地!
- 3. NoMaDbot™的核心技术① “方位推测”
- 4. NoMaDbot™的核心技术② “回声定位”
- 5. “方位推测”+“回声定位”=“无需地图”
- 6.“无地图”机器人移动技术的更多优势
- 7.ROHM开始开发自主移动技术的原因
- 8. NoMaDbot™的应用领域
- 9. NoMaDbot™对未来工业社会的展望
- 产品介绍、详细信息、其他链接等
在制造和物流行业,AGV(自动搬运机器人)和 AMR(自主移动机器人)的应用越来越广泛。由于劳动力短缺问题而引发担忧的同时,能够在工厂和仓库与人协同作业的AGV和AMR正在逐渐成为行业新宠。
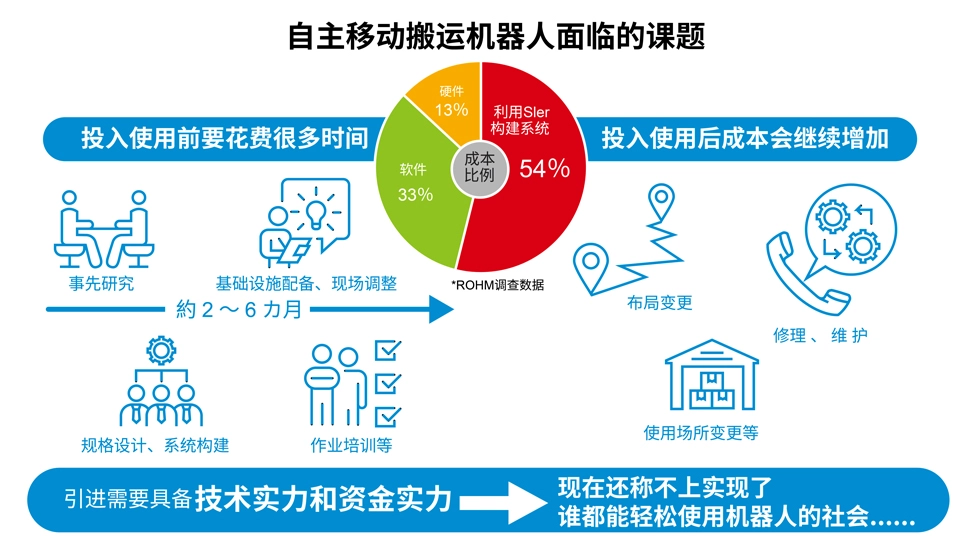
然而,AGV需要将磁条或二维码等导航装置贴在地面上来铺设行进路线。另外,AMR在购买之后也不能立即投入使用。在投入实际使用之前,需要规划行进路线和创建地图,需要耗费大量的时间和成本才能实际运行系统,风险非常大。此外,再考虑到发生故障时的紧急响应和维护,实施的门槛非常高,这是不争的事实。鉴于这些原因,可能很多人认为让AGV或AMR做的工作内容不值得花费那么大的引进成本。
对此,ROHM正在秘密开发一种新的搬运机器人移动技术,针对那些不足以由AGV和AMR来完成的任务,利用该技术将能够以很低的成本立即投入使用。这是使未来社会更加便捷的、基于全新理念开发的机器人解决方案。在本文中,将向大家稍微剧透一下NoMaDbot™(无地图移动机器人)这一新型移动技术的秘密。
*NoMaDbot™是ROHM Co., Ltd.的商标或注册商标。
**文中所记载的信息为截至2023年12月的数据。
1. AGV和AMR的普及所暴露出来的现场问题
在智能化转型的工业设施、工厂和物流等工作现场,AGV和AMR等搬运机器人的身影越来越多,并且其应用范围也越来越广。然而,随着它们的普及,各种问题也随之暴露出来。
尤其是AMR,由于其性能高,也能为改善工作环境做出巨大贡献,因而如今仍然备受关注。另一方面,鉴于“引进成本高”、“需要专业的SIer(系统集成商,构建系统的工程师)”、“到实际投入使用需要很长的时间”以及“频繁卡顿”等原因,似乎很多人在犹豫是否引进。
事实上,工作现场有很多简单的任务并不需要高性能的机器人。
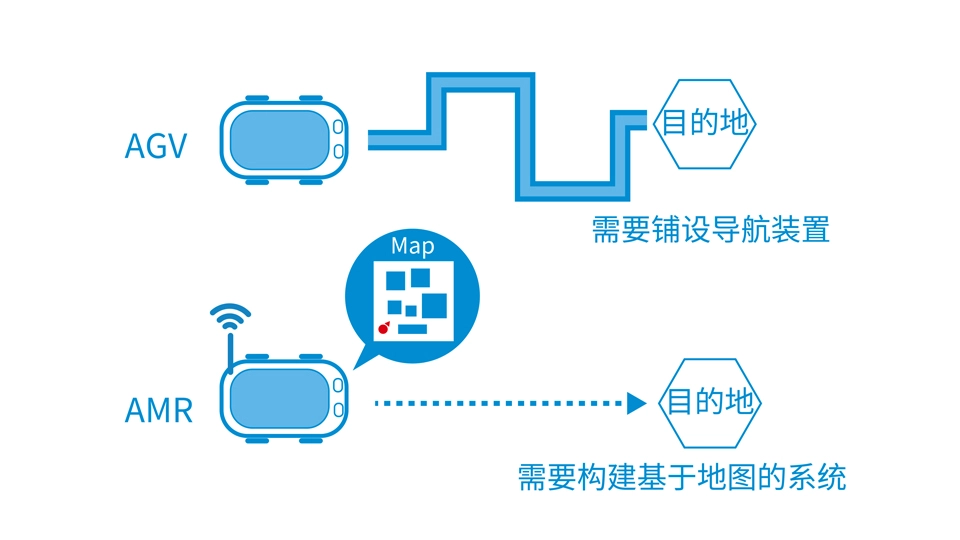
例如,针对“将某物从A处运到B处”的需求,如果使用传统的AGV,就需要铺设磁条等导航装置。如果使用AMR,情况则更为复杂。AMR使用的是一种称为SLAM(Simultaneous Localization and Mapping)的技术,可以在检测自我位置的同时创建地图。要想引入SLAM,需要由称为“SIer”的专业工程师设计出适合设备的规格并规划行进路线,而且只有在创建了地图之后才能实际投入使用。因此,购买后可能需要耗费几个月的时间才能真正实际运行。另外,如果设备的布局发生了变化,这些流程可能需要重新再来一遍。
在路线复杂、对精密性和速度要求很高的设备、以及布局在很长时间内不会改变的环境中,使用像AMR这样的高性能搬运机器人可以发挥非常大的作用,但是在诸如“希望将不用的东西或缺陷产品运到废弃物堆场”或“希望将某物从A交给B”这样的简单任务,并不需要太高级的性能和协作功能。在物流仓库、超市内部和活动会场这类“布局会频繁变化”的环境中,花费很长时间构建基于地图的系统,可能会导致对搬运机器人的采用犹豫不决。
“只要能搬运”就行,难道就没有更简单、性价比更高的搬运机器人吗?
为了满足客户的这种需求,ROHM开始开发一种新的机器人移动技术“NoMaDbot™”。
2.生物无需地图即可到达目的地!
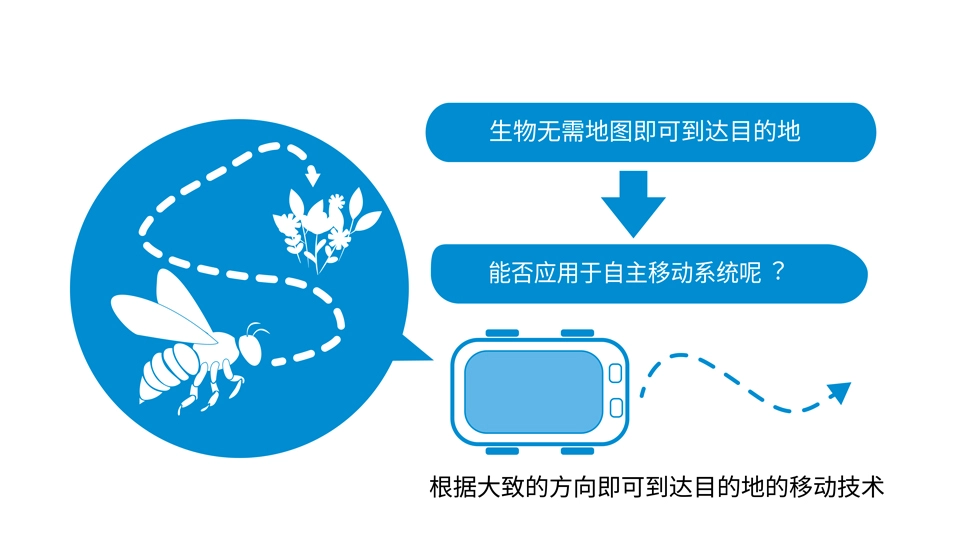
“NoMaDbot™”的开发始于“生物无需地图即可到达目的地”的逆转思维。
例如,昆虫和动物是根据大致的方向、大致的距离以及对当时情况的判断来寻找目的地的。 人类也一样。虽然去很远的地方时有时会依赖地图或导航,但大多数人去家附近的超市购物时应该不会随身携带地图或开导航的。即使是没去过的超市,只要知道大概的方向和距离,应该就能到达那里。另外,即使道路因施工封闭,或者有停放的汽车等障碍物,也可以避让或绕行,会根据当时的情况灵活应对,而不会半途停下。
那么是否有可能给搬运机器人配备类似于这种生物的、能够随机应变的自主移动技术呢?
对此,“NoMaDbot™”开发团队重点关注的是如何推测目的地的大致方向,以及如何在去往目的地的途中检测到并避让障碍物。
3. NoMaDbot™的核心技术① “方位推测”
NoMaDbot™的名称源自“No Map Driving robot”。即“不使用地图的自主移动技术”。
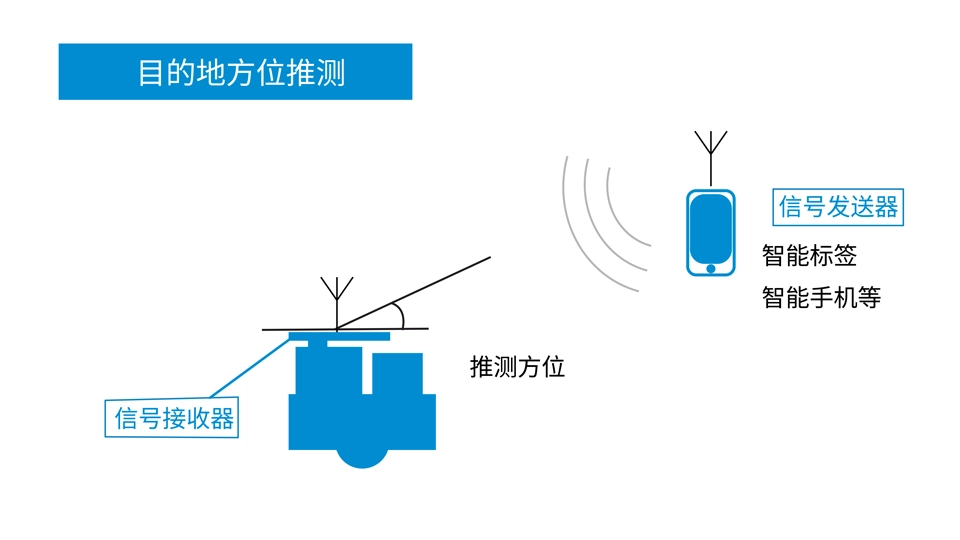
其核心技术之一是用来确定目的地方向的“方位推测”技术。
对于NoMaDbot™而言,充当信息发送器的智能标签(未来可能是智能手机等)就是目的地。NoMaDbot™需要检测出从信息发送器发出的无线电波并推测其方位。
虽然只能向目的地——智能标签行进,但这对于简单的搬运用途来说已经足够了。
另外,虽然无法像AMR那样对复杂的路线进行编程,但通过将多个智能标签组合起来并按顺序切换,也可以执行“将货物从A处运送到B处,然后去往C处”等工作。
4. NoMaDbot™的核心技术② “回声定位”
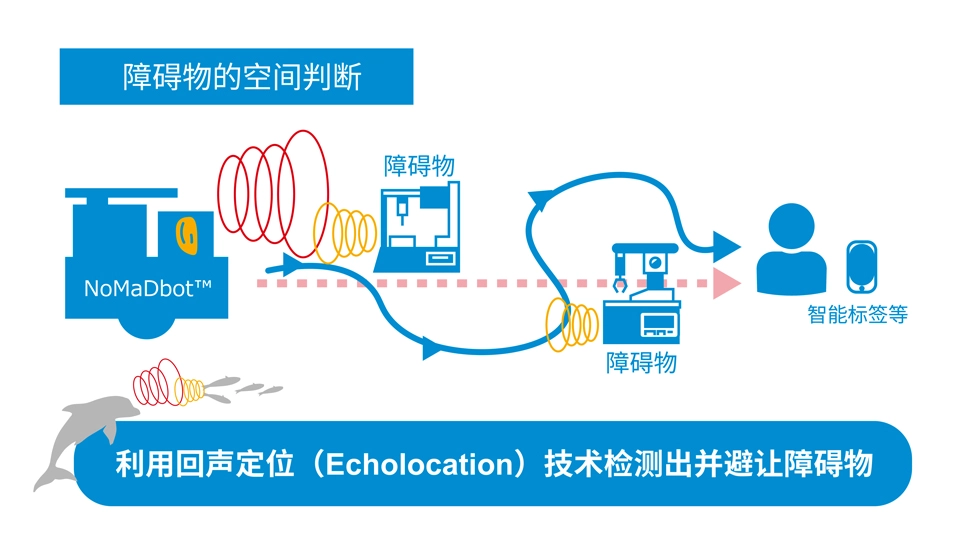
另一项核心技术是用来避让沿途障碍物的“回声定位(Echolocation)”技术。
回声定位是利用发射出去的超声波和反射回来的回声来检测和确定物体的距离、方向、大小等的技术。这是受到海豚、鲸鱼和蝙蝠等的空间判断能力启发而开发出来的技术。
通过在移动算法中使用回声定位技术,NoMaDbot™可以检测出并避让障碍物。
5. “方位推测”+“回声定位”=“无需地图”
通过融合“方位推测”和“回声定位”这两项核心技术,实现了“不使用地图的自主移动技术”的,是来自日本的全球首创全新机器人自主移动技术“NoMaDbot™”。
虽然不可能像使用传统技术“SLAM”的AMR那样进行高级协作和控制,但足以完成“运送货物”这类的任务,而且其应用场景应该非常多。更重要的是,采用了这种新的移动技术之后,将不再需要由SIer构建基于地图的系统,从购买之日起就可以立即投入使用。当然,也不会受到设备布局变更或工作场所变更的影响。
*截至2023年12月 ROHM调查数据
6.“无地图”机器人移动技术的更多优势
“不需要地图”所带来的好处不仅仅是降低成本和投入使用的速度。
由于无需使用地图,所以也不会因为跟丢地图上的位置而卡顿。也就是说,这是一种抗意外风险能力超强的自主移动系统。
另外,NoMaDbot™的移动算法并不是针对地图上的固定地点,而是针对智能标签等信息发送器,因此即使在行进途中目的地发生移动,只要在无线电波能够到达的范围内,就能够准确到达目的地。
除此之外,还可以执行仅使用基于以往SLAM的移动技术难以完成的任务,例如“实时尾随不断改变位置的A先生并将货物送达”或“跟随A先生搬运货物”。
7.ROHM开始开发自主移动技术的原因
那么,半导体制造商ROHM为什么要开始开发自主移动技术呢?
这是因为ROHM致力于“实现谁都能使用自主移动机器人的社会”的目标。
更重要的原因是,ROHM除了全球首创的自主移动技术“NoMaDbot™”之外,还拥有其核心技术中的核心——MEMS、AFE、小型MCU等多项关键技术,通过整合这些技术,可以创造出新的解决方案,这正是ROHM的优势领域。

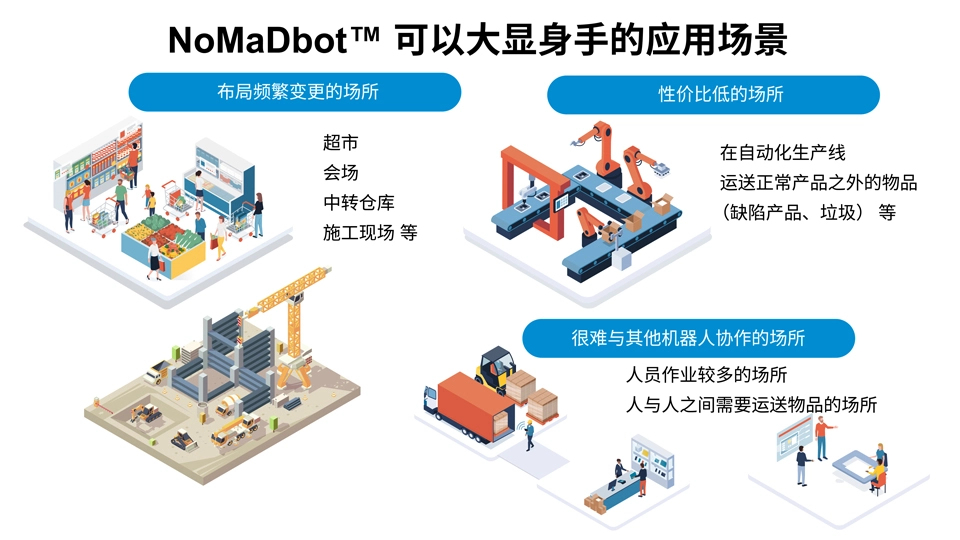
8. NoMaDbot™的应用领域
NoMaDbot™不否定AGV和AMR,也不与它们竞争。
对于希望确定行进路线的应用,可以使用AGV;对于希望完全自动化的应用,可以使用AMR;对于希望便宜且简单地实现自动化的应用,可以使用NoMaDbot™。这三种产品可以分栖共存。
例如,NoMaDbot™适用于布局会根据时间或季节而频繁变化的中转仓库等场所、超市、活动会场和施工现场等需要人与人之间运送物品的场所;工厂等正常产品之外的缺陷产品和垃圾等的运送作业。如果只是运送货物,NoMaDbot™比AGV或AMR更简单易用,在便捷性方面的优势非常大。这就是NoMaDbot™。
另外,随着未来的进一步开发,预计NoMaDbot™将能在更广泛的应用和环境中更加便利地使用,比如尾随智能标签携带者的跟随行进模式、以及将智能手机与应用程序联动等应用。

9. NoMaDbot™对未来工业社会的展望
NoMaDbot™旨在创造“谁都能使用自主移动机器人的社会”。
在不需要高性能机器人的应用场景中,使用更简单、成本更低、更易用的搬运机器人,可以提高生产效率,有助于促进制造和物流的自动化。
另外,通过与传感器融合概念相结合,NoMaDbot™还具有更大的发展潜力。目前仅针对陆地应用,未来ROHM还会开发出能够在天空、海洋等特殊环境下工作的产品,让我们拭目以待。